The Project
After designing our system, we had six months to build and implement it.
How did we do it?
The Beginning
Robotic football is an intercollegiate engineering challenge. It consists of 8-on-8 game play by robots that are individually controlled by a human driver (one human per robot). The rules of the game are meant to simulate NCAA football as closely as possible. As with human football, one of the most important players in robotic football is the quarterback. The quarterback must be able to complete quick and accurate passes to the wide receivers. Its ability to reliable do this can goes a long way to winning the game. This is one of the most significant consideration when designing the quarterback. In past years, the Notre Dame robotic football team has used an optical camera system on the quarterback to track and gage the distance to the wide receivers. The range on this system is limited, however, and poor lighting conditions can render it ineffective. This is where the Robotic Football Senior Design group comes into play. From the beginning, our goal has been to create a robust, longer range, easy to use, accurate, ranging and indoor positioning system to be used by the Notre Dame robotic football that will help bring them to victory.
Pictured below are the ND Robotic Footbal quarterback (left) and wide receivers (right).

The Design
High Level verses Low Level
High level design: This project started as an idea to create a positioning system that would be implemented by the ND Robotic Football team. We defined our subsystems as ranging, orientation, and communication. Our original high level design, which includes an estimated budget, can be found here.
Low level design: The details about our subsystems and their implemenation with one another makes up the low level design for the project. It was reviewed and edited throughout the design process as there were many decisions that took our project in a different direction than originally expected.
The Construction
We designed the board in early march so we could begin testing with our boards immediately following spring break. Stephen soldered everything because he's incredible. Once we had our custom boards we were able to download our code and begin testing the system. There is a picture of our boards at the bottom of this page.


The Implementation
As anticipated in the high level design, our subsystems were ranging, orientation, and communication; all working through a microcontroller. If you are interested in more detail on the subsystems used you can read more.
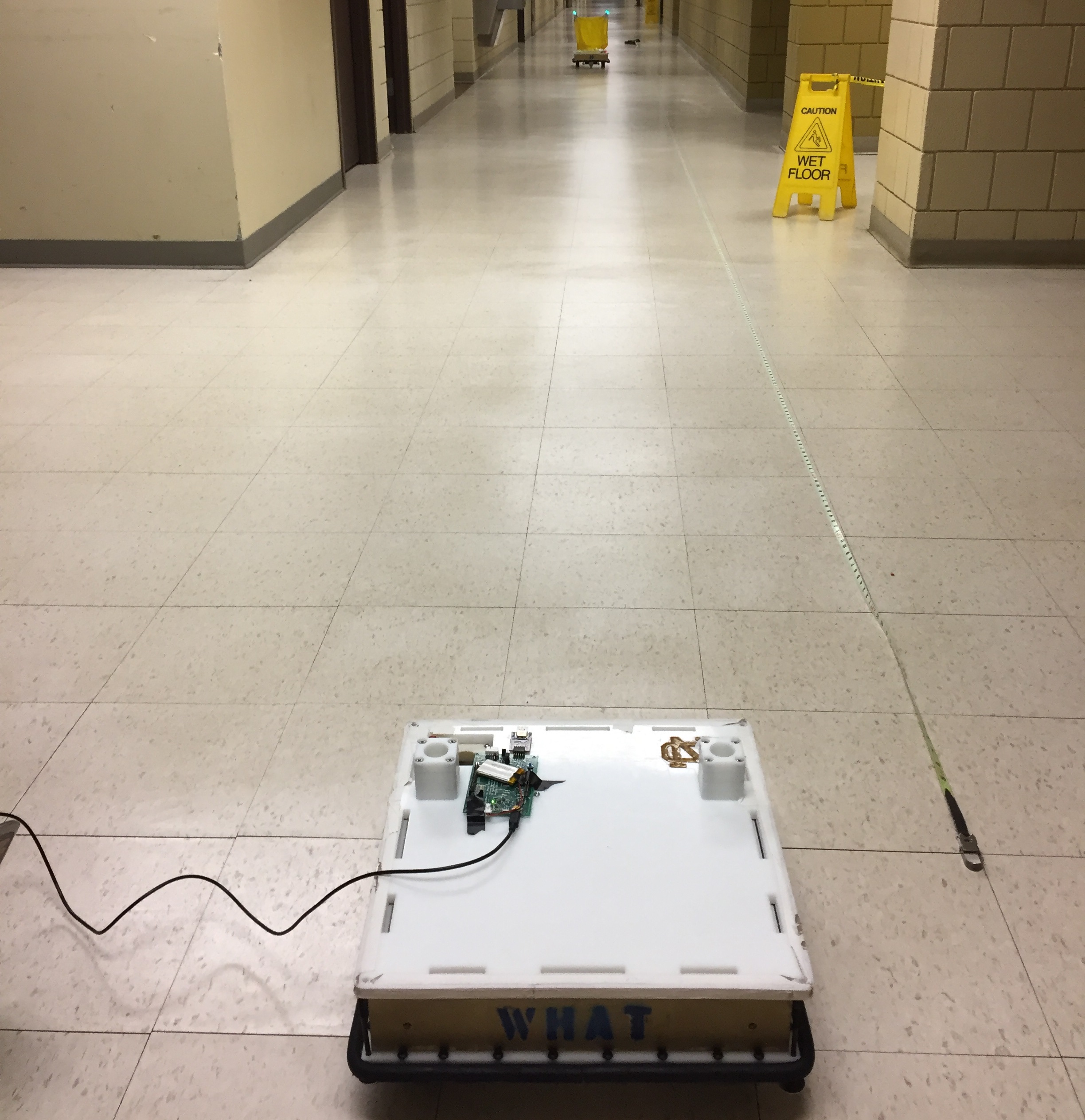
The Demonstration
On 5 May 2017, exactly six months after creating the high level design of our system, we demonstrated the completed project. Our GUI gave an accurate visual of the robot we drove around the field. A video of this can be found at the bottom of this page.
Future Developments
We hope this project will continue into the future and so have included what we believe are important developments to the system.
Fully integrate the ranging system into the quarterback and wide receivers on the ND Robotic Football team. This is enough to be the primary method for determining distances because it reduces the possibility of interference.
Expand the positioning system to track more than one robot at a time. This will enable more autonomous features in future robotic football competitions.
Develop the GUI to be compatable with multiple operating systems, perhaps using web-based interfacing. Expand the Wifi functionality to operate with pre-existing Wifi networks.
Increase RF reliability by selecting and placing antennas (rather than purchasing them as part of a module) to avoid interference from other robots in the area.
We cannot solve our problems with the same thinking we used when we created them. - Albert Einstein